
向量(vector)
1.向量
向量可以理解为空间中的一条线段。
当你加上一个坐标轴,将线段的一端摆到坐标轴的原点,那么便可以通过一个坐标(x,y,z)去表示这个向量。
向量的表示方式
但是向量一般用以下方式表示:
或者用:
向量的运算
【向量的相加】
用图形表示则如下:
向量的相加,等于向量对应的两条线段首尾相连,形成的一个新的向量。
【向量的数乘】
向量的数乘,等于向量在原有向量方向上伸长或缩短,方向不变。
向量的相加、数乘也被称为向量的线性运算。
【向量的点乘(dot product)】
又名点积、数量积。点积的定义又分为代数定义和几何定义。
对于向量a = (x1,y1),b =(x2,y2):
代数定义:
几何定义:
可以理解为:向量a的长度 乘以 向量b投影到向量a上的长度
点积满足交换律、分配律以及结合律。
- 交换律:
- 分配律:
- 结合律:
2.向量的基(basis)
当去掉坐标轴后,是不是就无法表示向量呢?这里又引入向量的“基”(basis)这个概念。
在去掉坐标轴之前,我们以x轴、y轴、z轴为向量方向,以1为向量长度,生成3个向量:
这3个向量又叫单位方向向量。
此时,
e1,e2,e3就可以称为v1的一组基(basis)。它们代替坐标轴作为v1的参照物。
向量可以有很多组基,在不同的基下,向量的数字定义也不一样。
例如以e1,e2,e3作为基,v1的数字定义为
但如果e1换成
3.向量的张成(span)
(1)对向量c1:
用几何定义来表示,可以看见,这个张成实质就是c1所在的一条直线:
(2)对两个向量c1:
用几何定义来表示,可以看见,这个张成实质就是一个平面:
(3)对第2节中的单位方向向量e1,e2,e3作任意相加和数乘运算,我们可以想象得到,它们的张成就是整个空间;
向量空间
略
4.向量的线性相关&线性无关
假设有以下3组向量:
你会发现,这3组向量形成的张成是一个平面,而不是整个空间。
为什么会产生这种情况?原因是:
即
此时,我们称这3个向量线性相关。
反之,
换一种说法:
线性相关的向量,满足
而线性无关的向量,只有
因此,我们可以得出线性相关的数学定义:
对于向量空间
4.1 线性相关的定理
定理1 a1,a2,...,an 线性相关的 充分必要条件 为:至少一个向量可由其他向量线性表示。
定理2 a1,a2,...,an 线性无关,但a1,a2,...,an,b线性相关,则b可由a1,a2,...,an唯一表示。
定理3 【替换定理】a1,a2,...,an 线性无关,可由b1,b2,...,bm表示,则m>=n
定理4 n+1个n维向量必线性相关
定理5 等价的线性无关的向量组向量个数相同
5.单位正交基
我们知道什么是线性相关了,此时我们可以重新定义一下基(basis):
若向量空间
通常我们研究的基都是单位长度且正交的。
- 单位长度:指的是每个基向量的矢量长度为1。
- 正交:这组基中任意两个向量点乘为零。
当然,基也可以不是单位长度,不是正交的,只是单位正交基比较方便我们研究向量。
6.基变换
在第2节中,我们看到向量在不同的基下的数学定义是不一样的。
就好像我们跑步时,用不同事物作为参照物,我们跑步的快慢看起来也不一样。
在单位正交基
当它在另一组单位正交基
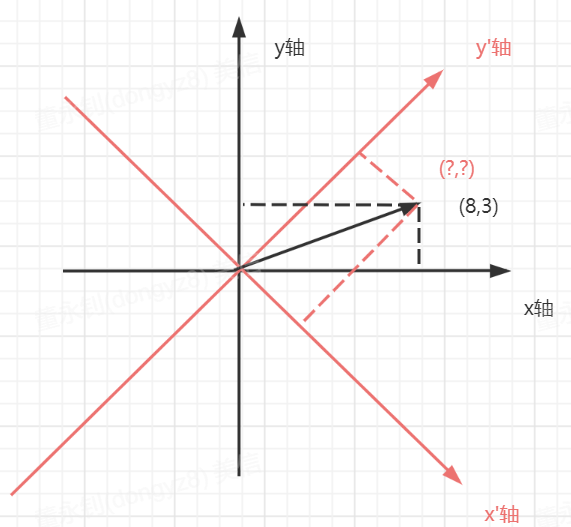
很简单,从图中我们可以看出:
用a1 与
用a1 与
结合1和2,得到向量a1在新基上的数学定义:
这种转换就叫基变换。
基变换的矩阵表示
略
7.向量组的秩
极大无关组
有以下向量组:
我们可以看到,a2可由a1表示(线性相关),a4可由a3表示。
因此,a2、a4其实是信息冗余的。
此时,我们称a1、a3为这个向量组的极大无关组。
性质:
- 极大无关组中的向量线性无关;
- 向量组中每个向量均可由极大无关组中的向量组合表示;
向量组的等价
定义:
- 两个向量组维度相同
- A中的向量可由B中向量通过线性计算得到,则称A、B向量组是等价的。
- 两个等价的线性无关的向量组所含向量的个数相同。
- 等价的向量组的秩相同,但是秩相同的向量组不一定等价。
性质:
- 反身性(自己与自己等价):
- 对称性(可以反过来写): 若
- 传递性:若
向量组的秩定义
极大无关组含向量的个数,就是该向量组的秩。记作r(a1,a2...,an)
注意:
- 0 <= r(a1,a2,...,an) <= min{向量的个数,向量的维数}
- a1,a2,...,an线性无关 等价于 r(a1,a2,...,an) = 向量的个数
- a1,a2,...,an线性相关 等价于 r(a1,a2,...,an) < 向量的个数
矩阵的行秩、列秩
【行秩】
我们将一个矩阵的每一行都看成一个向量,则我们可以得到一个行向量组。
这个行向量组的秩,就称作这个矩阵的行秩。
【列秩】
我们将一个矩阵的每一列都看成一个向量,则我们可以得到一个列向量组。
这个列向量组的秩,就称作这个矩阵的列秩。
定理1:矩阵的行秩 = 矩阵的列秩 = 矩阵的秩
定理2:r(AB) <= min{r(A),r(B)}
定理3:初等行变换不改变矩阵列向量组的线性关系
什么是向量组的线性关系?
求向量组的秩
步骤:
- 将向量组按列构成一个矩阵
- 只通过初等行变换,化成行简化阶梯型矩阵
- 首非零元所在列,作为极大线性无关组
- 剩下的列的表示系数即为简化阶梯型矩阵上对应的系数
例题:
求以下向量组的极大线性无关组,并用极大线性无关组表示向量组中的其他向量。
解答:
- 按列排成矩阵
- 通过初等行变换,将矩阵转换成简化阶梯型矩阵
- 首非零元所在列,作为极大线性无关组
即
- 剩下的列的表示系数即为简化阶梯型矩阵上对应的系数
剩下的两列:
可以直接用极大无关组乘以对应系数表示。
最后,原向量组的线性关系,与初等行变换之后的向量组的线性关系是一样的。